-
UID:317649
-
- 注冊時間2020-06-19
- 最后登錄2024-11-18
- 在線時間1524小時
-
-
訪問TA的空間加好友用道具

|
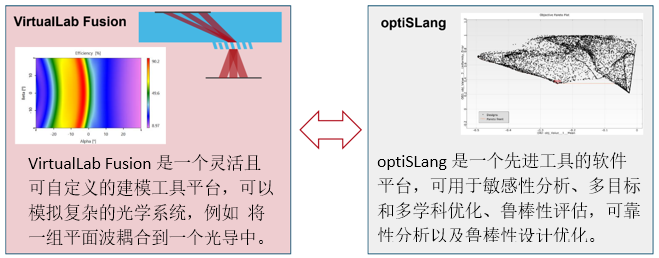
當(dāng)代光學(xué)系統(tǒng)的優(yōu)化往往涉及大量參數(shù)。正如光柵的優(yōu)化設(shè)計���,不僅需要考慮光柵的幾何參數(shù)���,更需要分析所需的入射方向。這樣的需求導(dǎo)致優(yōu)化過程面臨大量參數(shù)的挑戰(zhàn)��。在本實例中����,VirtualLab Fusion中提供了來自Dynardo的optiSLang軟件接口����,因此使優(yōu)化過程可以應(yīng)用不同的高級優(yōu)化算法�����。 O�'��*KNJX
*shE-w��;C
 ^g�i�seWR( ^g�i�seWR(
�k|'{$/��n 2. VirtualLab Fusion 和optiSLang的界面 M3!A��?!BU
=`��Pg�o5A
 1
�\:5ow&a 1
�\:5ow&a
TF�jb1�a,)
兩種軟件平臺的結(jié)合可實現(xiàn)先進(jìn)光柵結(jié)構(gòu)的優(yōu)化設(shè)計�����,例如智能光導(dǎo)耦合���。 ozy�~�`$;c :q/�%uca�9 3. VirtualLab Fusion –光學(xué)系統(tǒng)的初始化 Qo+I98L�X[
j��hOQ)QE| >|'�u:�`�A
初始系統(tǒng) �f�.-b.nNf
- 通常, VirtualLab中定義的每個光學(xué)系統(tǒng)都可以使用optiSLang進(jìn)行優(yōu)化 g�4EC[>5!r
- 在本例中�,光學(xué)系統(tǒng)由平面波光源和用于周期性介質(zhì)的光導(dǎo)耦合探測器組成。 #?D���wOUw
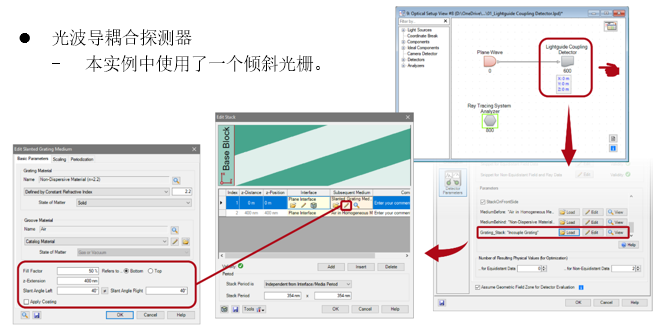
�XvETys@d� 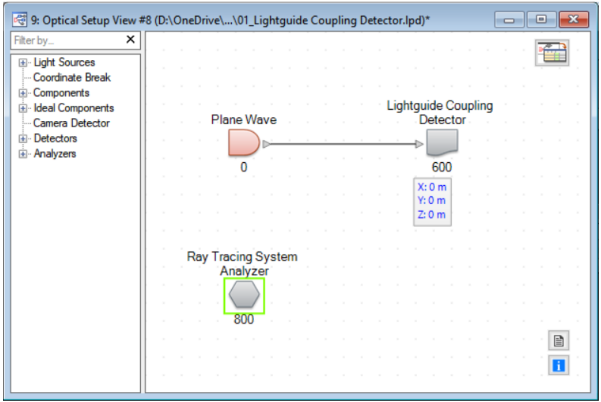 s�]@()?.E$ Q��}C)�az� 4. VirtualLab Fusion – 光導(dǎo)耦合探測器 F�L*qV"r^n 4���i|y�Ef ?S9? ?y/�� s�]@()?.E$ Q��}C)�az� 4. VirtualLab Fusion – 光導(dǎo)耦合探測器 F�L*qV"r^n 4���i|y�Ef ?S9? ?y/��
光波導(dǎo)耦合探測器 :��[YHJa�K
- 光波導(dǎo)耦合探測器是一種特殊的工具����,用于檢測特定角度入射范圍下周期結(jié)構(gòu)的效率。 nLicog)�!I
- 可以從探測器的“編輯”對話框中的目錄定義或加載周期性結(jié)構(gòu)����。 �58�9h�fET
_FR_6*C)5�  8�w�/�$!9[ 8�w�/�$!9[
�7uQiP�&�v
��-�j�9Wf=
 cBZ$$$v�\# cBZ$$$v�\#
j1D� 1�t�n 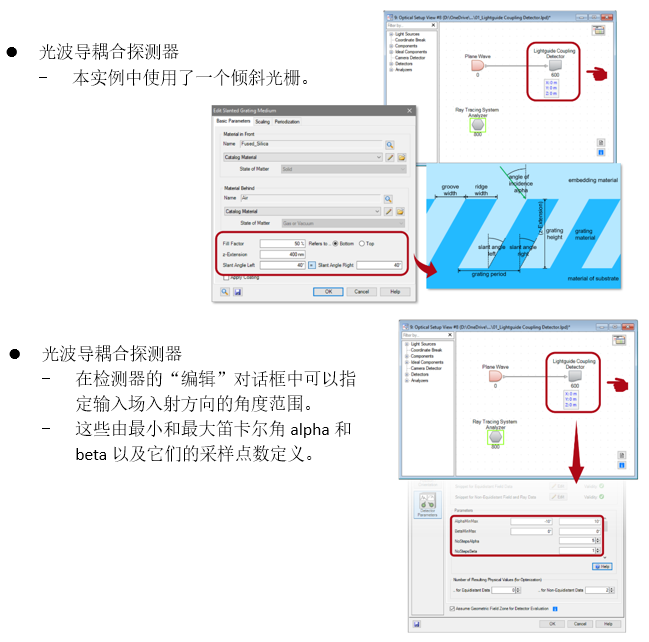 Zaw�n�x�= Zaw�n�x�=
��|qTvy,U[
5. VirtualLab Fusion – 光波導(dǎo)耦合 +?y ', Ir Uq/FH�@E=� 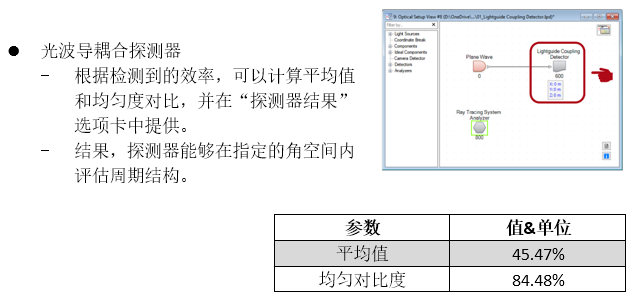 `Y]t*`�
e| �[��}:;B$, `Y]t*`�
e| �[��}:;B$,
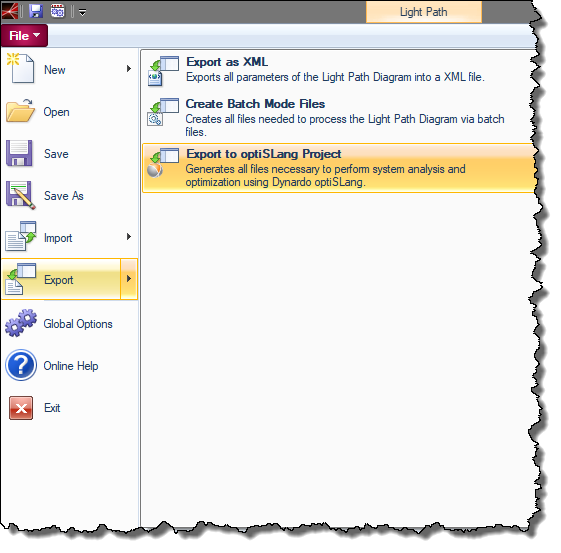
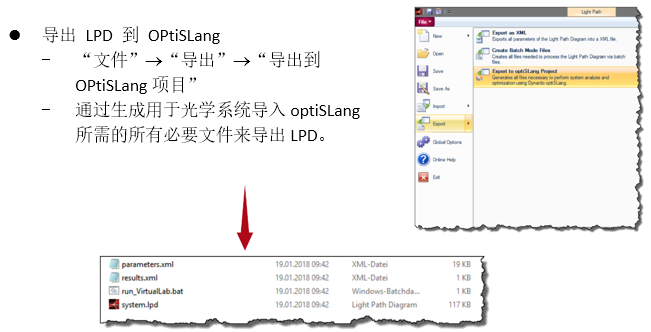
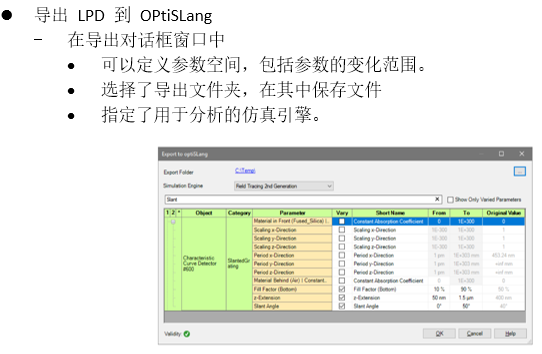
6. VirtualLab Fusion –導(dǎo)出 LPD 到 OPtiSLang V����ZF;��
)�}w2'(!X8
 )S"!�)\4 b )S"!�)\4 b
 ~;$,h �ET ~;$,h �ET
|


至其他版塊")