在F-Theta物鏡焦平面上���,光束的橫向位置線性依賴于球形入射角Theta(θ)和有效焦距(EFL)���。 理想的球入射角Theta和Phi可以由探測(cè)器平面上的光束理想橫向位置(x,y)計(jì)算得到�。 通過參數(shù)耦合進(jìn)行系統(tǒng)調(diào)整 如前面的掃描過程所示��,反射鏡傾斜和探測(cè)器平面上點(diǎn)位置之間的非線性關(guān)系可以由參數(shù)耦合中補(bǔ)償���。 因此����,對(duì)于某點(diǎn)的位置�����,掃描鏡的方向可使用三維反射定律來計(jì)算���。 使用參數(shù)耦合工具,系統(tǒng)可根據(jù)三維反射定律來進(jìn)行調(diào)整��。 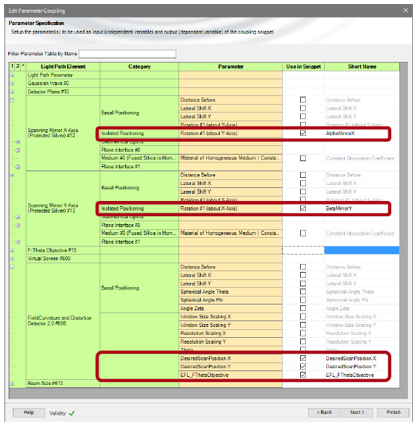
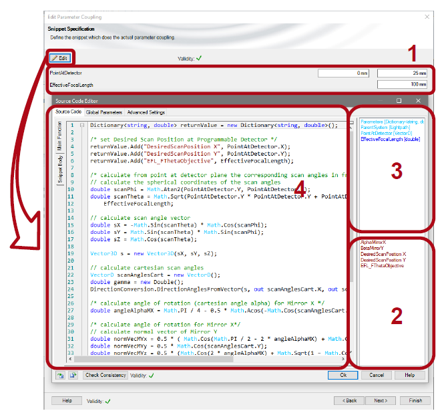
1.用戶在成像面輸入光束的理想橫向位置2.系統(tǒng)參數(shù) 3.輸入變量4.源代碼編輯器(腳本定義�����,實(shí)現(xiàn)實(shí)際的補(bǔ)償���。) 參數(shù)耦合腳本的輸入變量也可以通過LPD的參數(shù)預(yù)覽來進(jìn)行訪問����。 軸上的3D光線追跡分析 file used: LSC.0002_LaserScanning_F-ThetaObjective_01_RayTracing.lpd 離軸P(25,25)mm上的3D光線追跡分析 再次進(jìn)行掃描過程 使用參數(shù)運(yùn)行的掃描模式�����,從-10mm到10mm�����,在探測(cè)器平面逐步地(每個(gè)維度5步)上改變理想光束x位置和y位置���,以完成掃描過程����。 從參數(shù)運(yùn)行文檔�����,可以繪制場(chǎng)曲和畸變的期望的圖像��,如LSC.0001所示�����。 file used: LSC.0002_LaserScanning_F-ThetaObjective_04_ScanningProcedurePos.run 掃描過程中的組合點(diǎn)列圖 file used: LSC.0002_LaserScanning_F-ThetaObjective_04_ScanningProcedurePos.run 從參數(shù)運(yùn)行(Parameter Run)中,可以生成所有單點(diǎn)圖的組合點(diǎn)圖����。 點(diǎn)位置位于等距網(wǎng)格的原因是使用參數(shù)耦合(Parameter Coupling)工具補(bǔ)償反射鏡傾斜到期望輸入掃描角的非線性行為。 指定掃描過程的完整光線追跡數(shù)據(jù)可以在一個(gè)單獨(dú)文檔中獲得�。畸變?cè)u(píng)估 可以進(jìn)行一維畸變?cè)u(píng)估(輸入掃描角度Theta或者探測(cè)器橫向位置)����。 下圖顯示了使用F-Theta而不是一個(gè)非球面透鏡以顯著改善F-Theta畸變(LSC.0001)。 LSC.0001中可以找到計(jì)算畸變的一個(gè)詳細(xì)解釋�。 file used: LSC.0002_LaserScanning_F-ThetaObjective_05_FieldCurvatureDistortion.run results stored in: LSC.0002_LaserScanning_F-ThetaObjective_05_FiedlCurvatureDistortion.da 場(chǎng)區(qū)評(píng)估 以或者以輸入掃描角度Theta或者以探測(cè)器橫向位置來進(jìn)行一維場(chǎng)曲評(píng)估。 下圖顯示了使用F-Theta物鏡而不是一個(gè)非球面透鏡場(chǎng)曲的顯著改善(LSC.0001)�����。 可以在LSC.0001找到場(chǎng)曲計(jì)算的詳細(xì)說明����。 file used: LSC.0002_LaserScanning_F-ThetaObjective_05_FieldCurvatureDistortion.run • A detailed explanation of the calculation of the field curvature can be found in LSC.0001.results stored in: LSC.0002_LaserScanning_F-ThetaObjective_07_FiedlCurvatureDistortion.da 詳述應(yīng)用案例 場(chǎng)追跡的模擬和結(jié)果 分析光束剖面 幾何場(chǎng)追跡引擎可以在一個(gè)特定的探測(cè)器位置上更為精確地評(píng)估光束剖面��,位置和直徑�����。 因此,使用聚焦區(qū)域探測(cè)器�����,通過幾何場(chǎng)追跡在幾何區(qū)域內(nèi)傳播場(chǎng)并且在衍射區(qū)域內(nèi)求解光束傳播的衍射積分����。 將光束參數(shù)探測(cè)器(Beam Parameter Detector)應(yīng)用到傾斜探測(cè)器的場(chǎng)以獲得束腰距離dw。因此�����,場(chǎng)曲率值ZFC可以用物理光學(xué)方法進(jìn)行計(jì)算���。 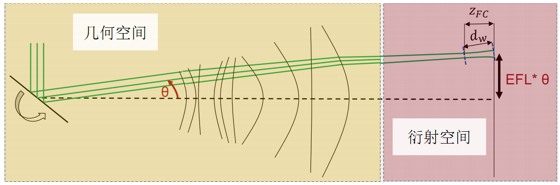 file used: LSC.0001_LaserScanning_Asphere_07_BeamProfileOffAxis.lpd file used: LSC.0001_LaserScanning_Asphere_07_BeamProfileOffAxis.lpd
在軸上P(0,0)mm分析光束剖面 在軸上�,對(duì)于強(qiáng)度分布來說�����,光束像差扮演一個(gè)次要角色�。 球形相位可以由場(chǎng)追跡計(jì)算,相對(duì)于光線追跡的結(jié)果顯示了附加的離焦����。這個(gè)離焦現(xiàn)象是由光束的衍射效應(yīng)造成的����。 file used: LSC.0002_LaserScanning_F-ThetaObjective_08_BeamProfileOnAxis.lpd 光束參數(shù)探測(cè)器確定光束直徑和質(zhì)心位置和束腰���。 由更精確的場(chǎng)追跡獲得的光束直徑�,明顯高于工光線追跡獲得的結(jié)果����。 附加的物理光學(xué)離焦由場(chǎng)追跡直接影響場(chǎng)曲值進(jìn)行計(jì)算,如下表所示��。 外軸P(0,25)mm上分析光束剖面 一般來說�����,離軸場(chǎng)軸上場(chǎng)由不同的中心方向與���。 因此可以通過傾斜探測(cè)器以避免線性相位疊加���,正如LSC.0001中提到。 像散球相位表明在x和y方向不同光束尺寸組形成的一個(gè)離焦光斑��。 由更準(zhǔn)確的場(chǎng)追跡獲得光直徑束明顯高于由光線追跡獲得的結(jié)果�����。此外�,由于像散,在x和y方向上所獲得的光束直徑有所不同�。 由場(chǎng)追跡計(jì)算的附加物理光學(xué)離焦直接影響了場(chǎng)曲的值,如下表所示��。 光束位置(=光束質(zhì)心)相比于光線追跡的結(jié)果也略有不同�����。 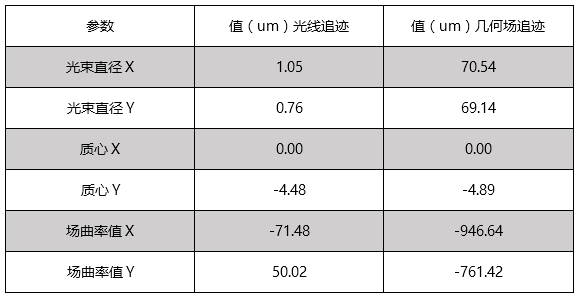
其他的VirtualLab特征 在此案例中����,你將從以下選擇的特征中獲益: 各種探測(cè)器 – 測(cè)量的焦點(diǎn)位置取決于鏡掃描角– 在探測(cè)器平面測(cè)量的光束位置 – 使用聚焦區(qū)域探測(cè)器計(jì)算聚焦區(qū)域中的場(chǎng) 參數(shù)耦合 對(duì)于掃描光學(xué)的期望輸入掃描角度Theta,調(diào)整反射鏡方向參數(shù)運(yùn)行– 估計(jì)掃描場(chǎng)尺寸 – 生成場(chǎng)曲和畸變圖樣 總結(jié) VirtualLab可以: 使用雙軸掃描鏡和F-Theta物鏡模擬激光掃描系統(tǒng) 在目標(biāo)平面分析偏轉(zhuǎn)光束 – 由光線追跡計(jì)算掃描場(chǎng)尺寸���,場(chǎng)曲和畸變– 由幾何場(chǎng)追跡精確計(jì)算光束剖面 – 場(chǎng)追跡可以精確分析光束位置和焦點(diǎn) 進(jìn)一步閱讀 進(jìn)一步閱讀:參考文獻(xiàn) [1] Von Scanlab7 - Eigenes Werk, CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=16724483[2] Frank Wyrowski ; Huiying Zhong ; Site Zhang ; Christian Hellmann; Approximate solution of Maxwell’s equations by geometrical optics. Proc. SPIE 9630, Optical Systems Design 2015: Computational Optics, 963009 (October 15, 2015) 進(jìn)一步閱讀 以下文件給出一個(gè)詳細(xì)的描述�����,如何在VirtualLab中設(shè)置和優(yōu)化激光系統(tǒng): 入門視頻: – 介紹光路圖– 介紹參數(shù)運(yùn)行 使用案例:– 元件的定位和取向 – 光線追跡引擎的設(shè)置和結(jié)果演示– 使用參數(shù)運(yùn)行文檔 – 一維數(shù)值數(shù)據(jù)陣列多重圖像模式– 大孔徑透鏡系統(tǒng)-通過幾何場(chǎng)追跡+進(jìn)行分析 | 

至其他版塊")
